











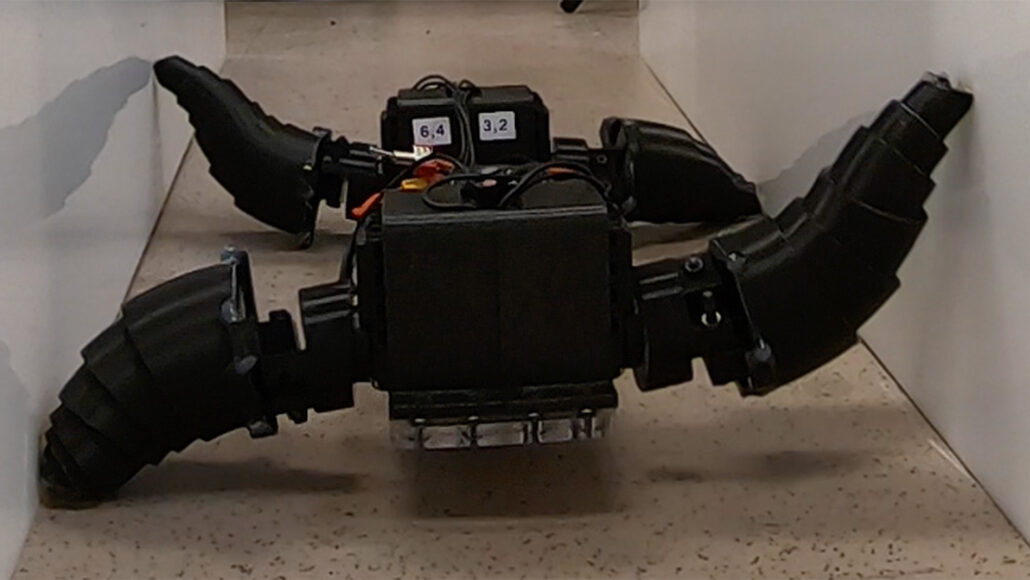
Inspired by how ants move through narrow spaces by shortening their legs, scientists have built a robot that draws in its limbs to navigate constricted passages.
The robot was able to hunch down and walk quickly through passages that were narrower and shorter than itself, researchers report January 20 in Advanced Intelligent Systems. It could also climb over steps and move on grass, loose rock, mulch and crushed granite.
Such generality and adaptability are the main challenges of legged robot locomotion, says robotics engineer Feifei Qian, who was not involved in the study. Some robots have specialized limbs to move over a particular terrain, but they cannot squeeze into small spaces (SN: 1/16/19).
“A design that can adapt to a variety of environments with varying scales or stiffness is a lot more challenging, as trade-offs between the different environments need to be considered,” says Qian, of the University of Southern California in Los Angeles.
For inspiration, researchers in the new study turned to ants. “Insects are really a neat inspiration for designing robot systems that have minimal actuation but can perform a multitude of locomotion behaviors,” says Nick Gravish, a roboticist at the University of California, San Diego (SN: 8/16/18). Ants adapt their posture to crawl through tiny spaces. And they aren’t perturbed by uneven terrain or small obstacles. For example, their legs collapse a bit when they hit an object, Gravish says, and the ants continue to move forward quickly.
2023-02-17 09:00:00
Article from www.sciencenews.org
In a recent breakthrough scientists have developed a robot that can squeeze through small, narrow crevices and spaces. This remarkable technology was demonstrated by a team of roboticists at ETH Zurich in Switzerland, who have developed an innovative robot that can squeeze its way through small, narrow openings efficiently.
The robot is surprisingly small, measuring at just 28 centimeters high when fully extended. It is also quite light and has a flexible body, enabling it to easily slip through tight spaces. The robot largely works by using small, motorized wheels. These wheels allow it to balance and propel itself through tight spaces, and the small size of the wheels means the robot can even fit into tight openings.
The development of the robot has numerous implications, providing scientists with exciting opportunities for exploration and research. For instance, the robot could be used to explore caves or be used for hazardous investigations in areas that are too dangerous for a human to enter. It has many potential applications in the fields of exploration, industrial inspection, search and rescue, and surveillance.
The team has also developed an algorithm to control the robot, to enable it to autonomously maneuver through tight spaces quickly and efficiently. This algorithm allows it to determine the best route and select the trajectory to use to get through tight spaces.
This breakthrough is quite remarkable and could prove to be invaluable for scientists and engineers in many different fields. It is expected that this technology will be further developed in the coming years, paving the way for more exciting opportunities for navigation and exploration.







